(C) Grasping a Micro-Part
Some assumptions are made about all micro-parts used by this microassembly system. These assumptions are: (1) Micro-parts can have their design geometry altered slightly (without altering their function) to accommodate the microassembly system. (2) Micro-parts are arranged in ordered, specific locations on the substrate, such as those shown in Fig. 5(a). (3) Microassembly implies that micro-parts would always be joined in some way to other micro-parts, and not released freely.
Based upon assumptions (1-3), each micro-part is designed to incorporate three modular features (shown in Fig. 5(b)), which are: (a) An 'interface feature' specifically designed to be grasped by the microgripper tips. (b) A 'tether feature', that secures the micro-part to the substrate and breaks away after the microgripper has grasped the micro-part. (c) A 'mechanical fastener feature', which is used to create joints between a micro-part and the chip substrate, or other micro-parts.
.JPG)
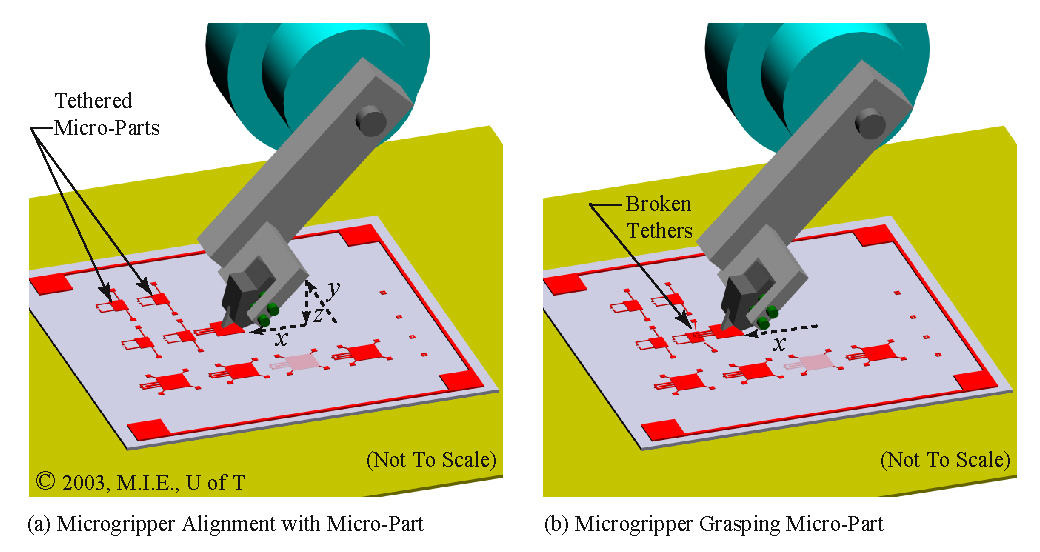
To grasp a micro-part, the microgripper is translated along the x, y and z axes to align its gripper tips with the interface feature of the micro-part, as shown in Fig. 6(a). After alignment, the microgripper is translated in the x-direction, causing it to grasp the micro-part. Details of the design and operation of the microgripper are provided in [1].
After a successful grasp, the microgripper must remove the micro-part from the substrate. Each micro-part is attached to the substrate by tethers, as shown in Fig. 5(a) and 5(b). In order to remove a micro-part, the tethers that hold it to the substrate must be broken. The tethers are designed to break/rupture when the microgripper is translated further in the x-direction beyond the grasping position, as shown in Fig. 6(b). Details of the tether design and operation are provided in [4].