(A) The Robotic Workstation
A five axis robotic manipulator, named the MJMP (Manipulator and Joiner of Micro Parts) is the basis of the microassembly workstation, shown in Fig. 1 below. The axes of the MJMP are split into two groups with the x, y and alpha axes as one group on the granite base, and the z and beta axes as the second group mounted on the granite post.
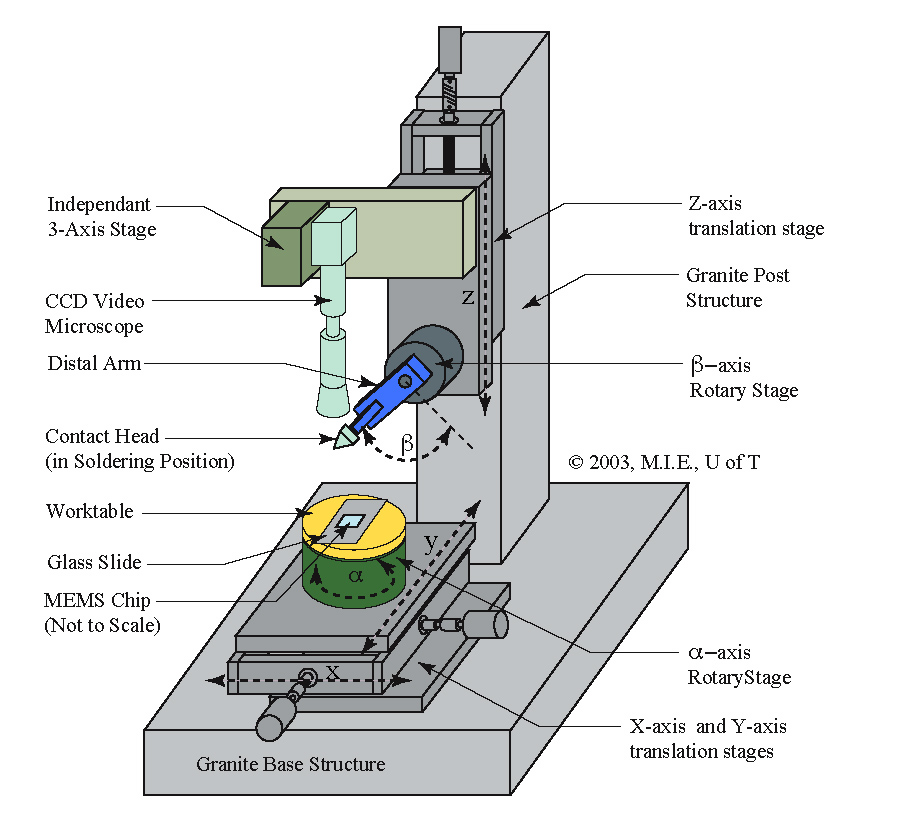
The alpha and beta rotational axes are custom designed to have radial and axial runouts of less than 2 µm. The motors driving the rotational axes have a resolution of 0.36°. In addition, there is an independent 3-axis translation stage on which the microscope system is mounted. This allows the microscope to be moved independently of the MJMP. The actual MJMP is shown in Fig. 2 below.
.JPG)
The MJMP is designed for control in a dual mode manner. In one mode, it is designed as a tele-robotic system that is controlled by a human operator. In the other mode, it is designed for automatic control using sensor feedback, in order to maximize the assembly rate. This dual approach is pragmatic for this system. Due to the experimental nature of grasping, manipulating and joining micro-parts, human operator control is a pre-requisite to fully defining a particular microassembly process and its parameters. Work involving experimental procedures such as grasping and joining is carried out by an operator using a joystick. The operator relies on the video microscopy system for visual feedback, and a readout display showing the linear encoder positions. For proven procedures, such as the locating the plane of the substrate chip, and solder bonding to microgrippers, the MJMP uses automatic control, via a program and data capture through the Galil card. Automatic control of the grasping and joining operations is the ultimate goal of this system, and is under investigation.